Hintergrund:
Im 3. Semester an der STA München, Fachrichtung Nachrichtentechnik, sollte im Rahmen des Elektrotechnik Praktikums ein Projekt realisiert werden. Die Findung einer Projektidee in 2er Teams sowie die Planung, Aufbau und anschließende Dokumentation gehörten zur Aufgabe.
Projektidee:
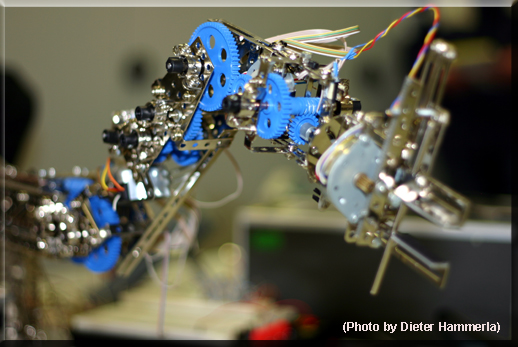
Unsere Idee war es einen Rotoberarm aus Metall zu bauen, der min. 3 bewegliche Gelenke besitzt, einen Greifarm zur Aufnahme von Gegenständen hat und sich um die eigene Achse drehen kann. Die Steuerung des Armes erfolgt über einen Joystick, der an einen PC angeschlossen die Steuersignale in einem LabVIEW Programm auswertet. Eine kleine Kamera am Greifarm sollte die Koordination erleichtern, wurde aber wegen des knappen Zeitplanes und Aufgrund des Zusatzgewichtes nicht verwirklicht.
Wir danken für die freundliche Unterstützung:
- Dipl.-Ing. Dirk Müssig (techn. Support)
- Jakob Aps (Zeichnung)
- Dieter Hammerla (Photo)
- Manfred Glashauser, Industriebedarf (Gegengewicht)