www.roboarm.de
Das Team
Fotos
Links
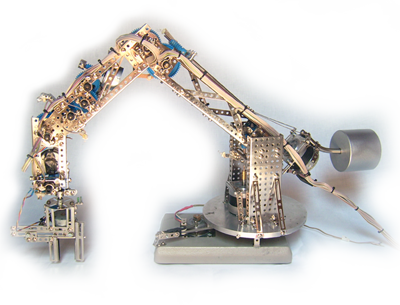
Roboterarm
Hier nur ein paar Daten zum fertigen Roboterarm:
- Gewicht: 14,5 kg
- Motoren: 6 bipolare Schrittmotoren
- Arbeitsstunden: ca. 250h
- Material: Construction Metallbauelemente von Eitech
- Standfuß: alter Standfuß einer Stehlampe
- Gegengewicht: 2,5kg schweres, maßives Drehteil
- Lagerung der Gelenke: 28 Rillenkugellager
- Sonstiges: Riemen, Spanner und Rollen aus alten Druckern
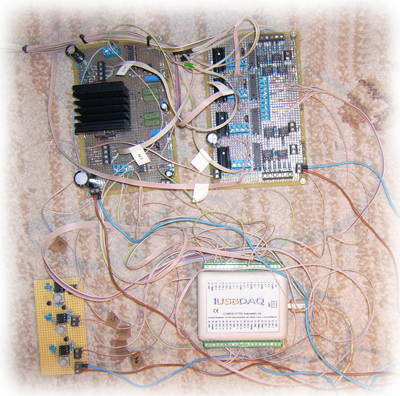
Ansteuerung
Die Steuerung des Roboterarms erfolgt mittels eines Joysticks, der über einen USB-Adapter an den PC angschlossen ist. Die Bewegungen am Joystick werden durch ein LabVIEW Programm erfasst, verarbeitet und entsprechende Steuersignale an ein DAQ-Modul (iUSBDAQ) geschickt.

Video
Video-Download als AVI